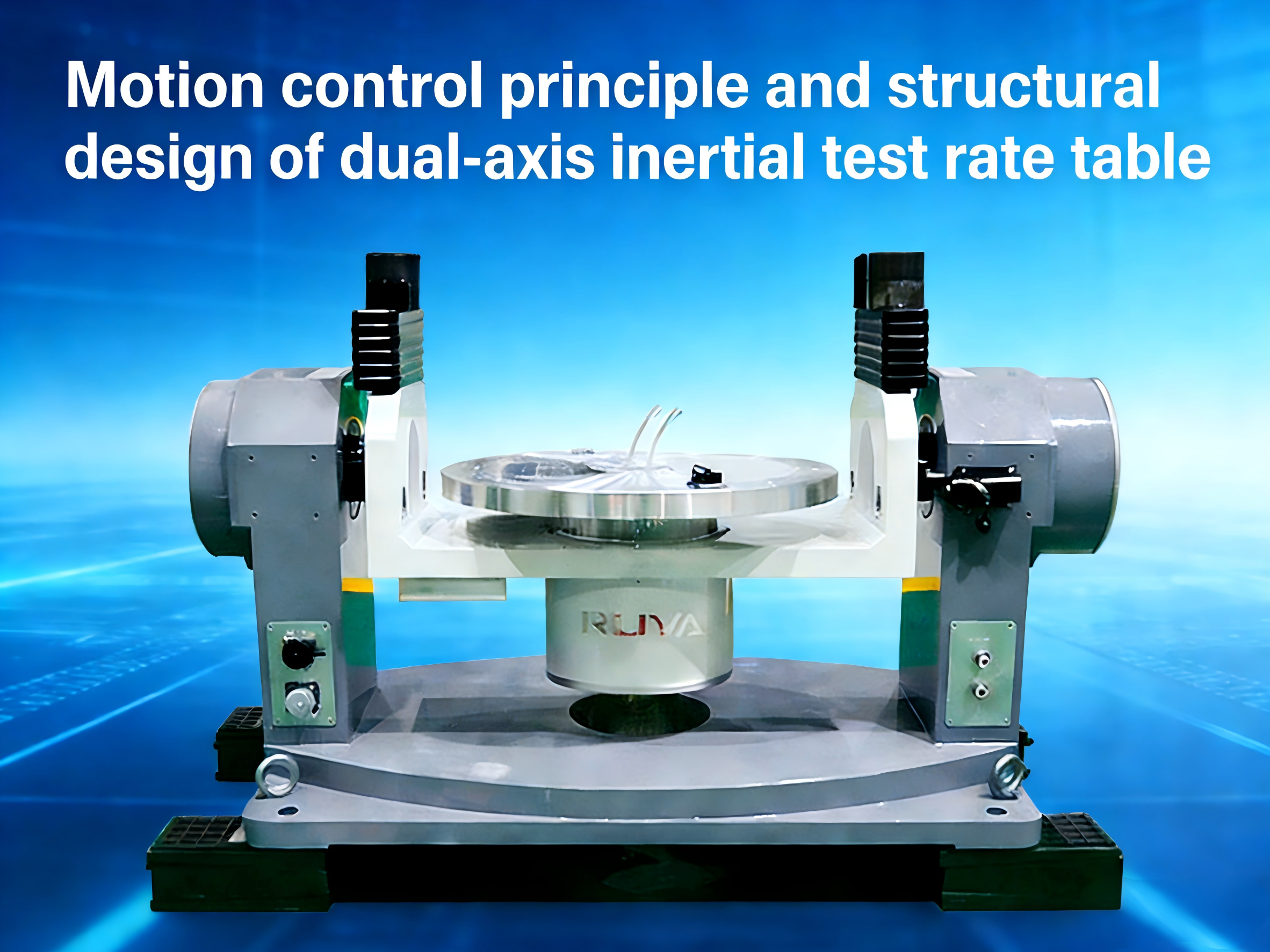
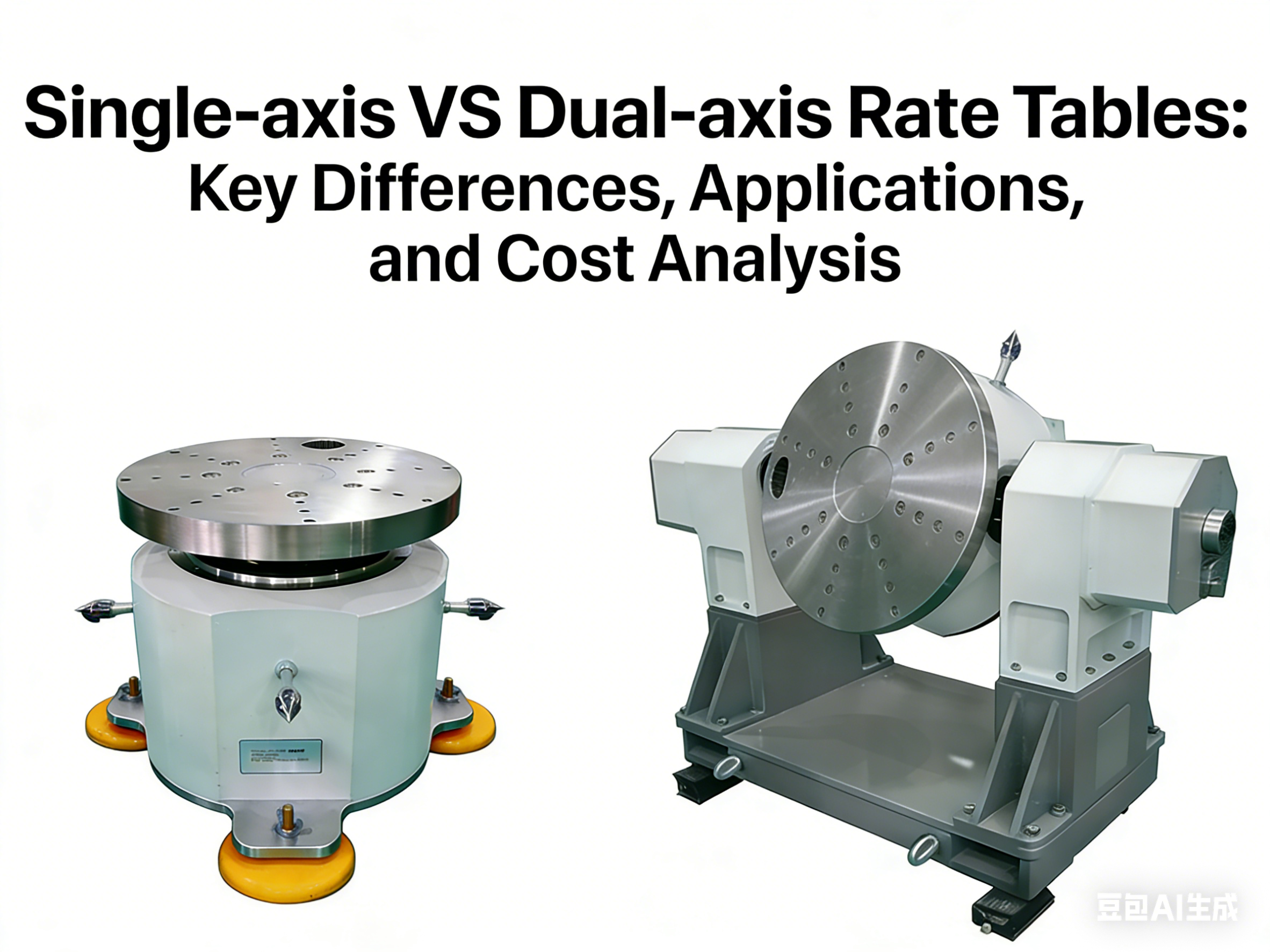
관성 원자의 핵심 구성 요소로서항법 시스템, IMU의 측정 정확성은 항법 시스템의 전체 성능을 직접 결정합니다. Two-dimensional calibration of the IMU primarily involves calibrating the error parameters of the accelerometers and gyroscopes in the horizontal plane (typically a combination of pitch-roll or azimuth-pitch)A듀얼 액스 속도높은 정밀 각 위치 및 자세 제어 기능과 함께 테이블은이 캘리브레이션을 달성하기위한 핵심 장비입니다.산업 표준 및 엔지니어링 관행에 기초한, 2 축 IMU를 사용하여 2 차원 IMU 정렬의 전체 프로세스를 상세히 설명합니다.비율표, 네 가지 주요 단계를 포함합니다: 사전 정형화 준비, 핵심 정형화 절차, 데이터 처리 및 검증 및 표준화를 보장하는 마지막 단계그리고반복성캘리브레이션 과정의 신뢰성캘리브레이션결과입니다.
I. 캘리브레이션 전 준비
캘리브레이션 사전 준비는 캘리브레이션 정확성을 보장하는 데 필수적입니다.IMU 설치 및 디버깅, 각 단계가 캘리브레이션 요구 사항을 충족하는지 확인하기 위해 소프트웨어 시스템 설정.
(Ⅰ) 장비 선택 및 검사
1.듀얼축비율표 선택: IMU의 정확도 수준과 캘리브레이션 요구 사항에 따라 이중축을 선택합니다.비율각 위치 정확성, 각 속도 안정성 및 축 수직성에 대한 요구 사항을 충족하는 표. 중~고도의 정확성 IMU (항법 수준의 IMU와 같이)비율테이블의 각 위치 정확도는 10′′ 이상, 축 수직성은 5′′ 이상이어야 합니다. 소비자급 IMU의 경우비율테이블의 정확도는 적절하게 감소 할 수 있습니다 (각지 위치 정확도 ≤ 30 ′′). 동시에,비율테이블은 정적 위치 및 동적 속도 출력 모드를 지원해야 하며 가속도 측정기 제로 편향 및 스케일 요인에 대한 캘리브레이션 요구 사항을 충족해야 합니다.자이로스코프 제로 bias 및 스케일 인수.
2.보조 장비 검사: IMU에 전원을 공급하기 위해 고정도 전원 공급 장치 (출력 전압 안정성 ≤0.1%) 를 준비하여 전압 변동으로 인해 측정 오류가 발생하지 않도록 한다.데이터 획득 카드 ( 샘플링 속도 ≥100Hz) 를 사용, 해상도 ≥16-비트) IMU에서 출력되는 가속 및 각속도 신호와 각 위치/각 속도 피드백 신호를 획득하기 위해비율표; 세르보 제어 시스템을비율또한, 도구와 같은평준화 장치설치 후 IMU를 평준화하고 고정하기 위해 토크 랭크가 필요합니다.
3.장비 등정 및 검증: 이중축의 예비 캘리브레이션비율테이블은 각 위치를 확인하기 위해 수행됩니다,각률정확성 및 축직성다른 기술 사양 중실제 값과 명령 값은비율각 각도 위치에서 표를 측정하여 편차가 허용 한계 내에 있는지 확인합니다.비율테이블의 수평 참조 평면이 평면성이5동시에, IMU는 전원을 켜고 미리 가열, 그것의 초기 출력 상태는 기록되고, 초기 장비 장애는 제거됩니다.
(Ⅱ) 환경 상태 관리
1.온도 조절: IMU의 오류 매개 변수는 온도에 의해 크게 영향을 받습니다. 캘리브레이션 환경 온도는 (20±2) °C에서 제어되어야하며 온도 변화 속도는 ≤0.5°C/h입니다.. This can be achieved through a constant temperature laboratory or a temperature control system to ensure temperature stability during calibration and reduce the impact of temperature drift on the calibration results.
2.진동 및 간섭 제어: 캘리브레이션 환경은 진동원으로부터 멀리 있어야 합니다.,무거운 차량 등), 그리고 지상에서 진동 격리 조치를 취해야 합니다.진동 격리 기반을 건설하거나환경 진동 가속도가 ≤0.01g인지 확인하기 위해 진동 격리 패드를 설치합니다. 동시에 강한 전자기 간섭을 피하고비율테이블, IMU 및 데이터 수집 장비 (어어딩 저항 ≤4Ω) 는 IMU 출력 신호에 대한 전자기 소음 간섭을 줄이도록 한다.
3.공기 압력 및 습도 조절: 정렬을 위해 공기압에 의존하는 IMU (바로미터와 결합된 IMU들) 에서, 주변 공기압은 표준 대기압 (101.325kPa±1kPa) 에 안정화되어야 합니다.그리고 상대 습도는 40%~60%에서 조절되어야 합니다. 습도의 변화가 IMU의 내부 회로가 습해지거나 단열 성능이 악화되는 것을 피하기 위해서입니다..
(Ⅲ) IMU 설치 및 디버깅
1.기계 설치: IMU를전용 클램프를 사용하여 이중축 속도 테이블의 작업 테이블, IMU의 감지 축이 r와 정렬되어 있는지 확인먹었다일반적으로 IMU의 X축은 r의 회전 축에 평행해야합니다.먹었다테이블의 내부 (또는 외부) 축, 그리고 Z 축은 r에 세로해야 합니다먹었다테이블의 작업 테이블 평면 (즉 중력 방향으로) 토크 래인치를 사용하여 클램프를 지정된 토크에 고정합니다.적정시 IMU의 이동을 유발할 수 있는 과도한 느슨함을 피하는 것, 또는 IMU 구조 변형을 일으킬 수있는 과도한 밀착.
2.축 정렬 캘리브레이션: IMU와 IMU 사이의 정렬 정확도비율표는 레벨 및 레이저 위치 기기를 사용하여 캘리브레이션됩니다. 먼저,비율테이블을 수평 위치로 설정하여 IMU의 Z축이 중력 방향에 평행하도록합니다.비율테이블, IMU의 감지 축과비율테이블의 회전 축. 평행성 오류는 ≤5′′가 되어야 합니다. 정렬 정확도가 요구 사항을 충족하지 않으면,펌프 위치를 조정하고 표준을 충족 할 때까지 캘리브레이션을 반복합니다..
3.전기 연결 및 디버깅: IMU를 전원 공급 및 데이터 획득 카드에 연결하여 안전 전선화와 좋은 접촉을 보장하여 느슨한 연결로 인한 신호 손실 또는 왜곡을 피합니다.선열시간은 IMU 유형에 따라 달라집니다 (항비용 IMU는 일반적으로 30-60 분이 필요합니다.), 소비자 수준의 IMU는 IMU의 내부 온도가 안정화되도록 10-20 분이 필요합니다. 사전 가열 중에 IMU의 출력 신호의 안정성을 모니터링하십시오. 신호 변동이 발생하면,과도한 소음, 또는 다른 이상 발생, 전선 또는 장비의 문제 해결.
(Ⅳ) 소프트웨어 시스템 설정
1.제어 소프트웨어 구성: 이중 축을 설치비율테이블 제어 소프트웨어와 r를 구성먹었다테이블의 축 매개 변수 (축 지름, 전송 비율 등), 제어 모드 (정적/동적), 각 위치/각 속도설정, 등 동시에, 데이터 획득 트리거 조건을 설정먹었다테이블의 자세가 안정되어 전환 과정에서 신호 간섭을 피합니다.
2.데이터 획득 소프트웨어 디버깅: 샘플링 속도, 샘플링 기간 및 데이터 저장 형식 (예: CSV, MAT 파일) 과 같은 매개 변수를 설정하여 데이터 획득 소프트웨어를 디버깅합니다.IMU 출력 신호와비율테이블 피드백 신호, 그들의 시간표가 오류 ≤1ms와 일치하는지 확인합니다. 시뮬레이션 획득 테스트를 통해 데이터 획득의 무결성과 정확성을 확인합니다.데이터 손실 및 지연과 같은 문제 해결.
3.캘리브레이션 알고리즘 배포: 캘리브레이션 요구 사항에 기초 (가속도 측정기 편향/ 스케일링 인자 캘리브레이션, 자이로스코프 편향/ 스케일링 인자 캘리브레이션 등)해당 캘리브레이션 알고리즘을 배포 (최소한 제곱 방법과 같이), 칼만 필터 메소드). 반복 수와 컨버전스 임계 등 알고리즘 매개 변수를 초기화합니다.알고리즘이 IMU의 오류 매개 변수를 정확하게 해결할 수 있는지 확인합니다..
II. 코어 캘리브레이션 프로세스
핵심 캘리브레이션 프로세스는 IMU의 두 가지 핵심 구성 요소: 가속도계와 자이로스코프 주위를 회전합니다.이중축의 정적 위치 및 동적 속도 제어 기능을 기반으로비율표, 두 차원의 오류 매개 변수는 단계별로 캘리브레이션됩니다. 이 과정은 "피치 롤" 2 차원 캘리브레이션을 예로 삼고 세 가지 주요 단계를 포함합니다.가속도 측정기 정적 정정, 자이로스코프 정적 제로 비아스 캘리브레이션, 자이로스코프 동적 속도 캘리브레이션.
(Ⅰ) 가속도 측정기의 정적 캘리브레이션
가속도 측정기의 정적 정렬의 목적은 그 제로 편향과 스케일 인수를 해결하는 것입니다.다른 자세에서 중력 가속의 투영을 참조 입력으로 사용합니다., IMU의 가속 신호 출력을 측정하여 오류 모델을 설정하고 매개 변수를 해결합니다.
1.캘리브레이션에 대한 태도 계획: 두 차원 방향의 경사 및 롤을 기반으로, 여섯 가지 전형적인 정적 자세가 계획되어 있습니다.가속도계의 민감한 축과 Z 축)특정 자세는 다음과 같습니다: 1 pitch 0 °, 롤 0 ° (중력 방향으로 Z 축이 긍정); 2 pitch 0 °, 롤 180 ° (중력 방향으로 Z 축이 부정); 3 pitch 90 °,롤 0° (중력 방향으로 X축이 긍정); 4 기울기 90°, 롤 180° (중력 방향으로 X축이 음수); 5 기울기 0°, 롤 90° (중력 방향으로 Y축이 양수); 6 기울기 0°,롤 270° (중력 방향으로 Y축 음수).
2.태도 조정 과 안정화: 각 자세에 대한 각도 위치 명령은 두 개의 축을 통해 순차적으로 전송됩니다비율테이블 제어 소프트웨어.비율테이블은 IMU를 목표 자세로 회전하도록 유도하면 정적으로 안정적으로 유지됩니다. 각 자세에 대한 안정화 시간은 ≥30s입니다.IMU의 가속 신호 출력 안정성 확보 (신호 변동 진폭 ≤0.001g) 안정화 도중, 각 위치 피드백 신호비율표가 실시간으로 모니터링됩니다. 자세 편차가 허용 범위를 초과하면 (≤ 5 ′′),비율이 테이블은 자동으로 보상 조정 작업을 수행합니다.
3.데이터 수집 및 기록: 각 자세가 안정화되면 데이터 획득 소프트웨어가 활성화되어 IMU에서 출력되는 X, Y 및 Z 축 가속 신호를 획득합니다. 샘플링 기간은 ≥10s입니다.샘플링 속도가 ≥100Hz동시에, 실제 각 위치는비율각 민감축 (반응 입력) 에 대한 중력 가속의 투사 값을 계산하기 위해 표 (직사각 θ, 굴림각 φ) 를 기록한다.수집된 데이터는 태도에 따라 저장됩니다, 자세 정보와 시간표가 표시되어 있습니다.
4.오류 모델 설정 및 매개 변수 해결: 가속도 측정기의 오류 모델은 교차 결합 오류를 무시하여 설정됩니다. (두차원 캘리브레이션으로 단순화 될 수 있습니다.) 오류 모델은 다음과 같습니다.
a = K(a + b) (i=X,Y,Z)
a는 IMU의 i 축 출력 가속, K는 i 축의 규모 인자, a는 i 축의 참조 가속 (중력 가속의 투사),그리고 b는 i축의 0편향입니다a ( θ와 φ에서 계산된 참조 가속도, 예를 들어 Z축 참조 가속도 a=g·cosθ·cosφ, X축 참조 가속도 a=g·sinθ,Y축 참조 가속 a=g·sinφ·cosθ, 여기서 g는 중력 가속도이며, 9.80665m/s2로 계산되며, 이에 해당하는 a, K 및 b는 최소 제곱 방법을 사용하여 해결됩니다.
(II)지로스코프 정적 제로 bias 캘리브레이션
지로스코프의 정적 제로 편향은 각속도 입력이 없을 때 지로스코프의 출력 편차를 의미합니다.IMU가 정지하는 동안 장기적인 데이터 수집을 통해 해결해야 합니다..
(III)자이로스코프 동적 속도 캘리브레이션
자이로스코프 동적 속도 캘리브레이션의 목적은 그것의 확장 인수를 해결하는 것입니다. 이중 축에 의해 알려진 각 속도 출력을 사용하여비율표를 기준 입력으로, 오류 모델이 설정되고 스케일 인수는 자이로스코프의 출력 신호를 측정하여 해결됩니다.
1.캘리브레이션 자세 선택: 0° 픽치와 0° 롤과 수평적인 자세를 선택하십시오. 이 자세에서 IMU는 각 속도 입력이 없으며 회전경 출력은 지오 편향과 소음만을 포함합니다.비율테이블이 이런 자세로 회전할 필요가 없습니다. 단순히 수평적이고 안정적인 무대를 유지하십시오.
2.장기 데이터 수집: 데이터 획득 소프트웨어를 시작하고 회전경의 X, Y, Z 축의 출력 신호를 획득합니다. 샘플링 시간은 ≥60 분이고 샘플링 속도는 ≥100Hz입니다.인수 과정에서주변 온도를 지속적으로 모니터링하고비율표의 자세를 조절하여 온도 안정성을 보장합니다 (변동 ≤0.2°C) 그리고 자세의 변동이 없도록 합니다 (편차 ≤5′′) 외부 요인으로부터 추가적인 오류가 발생하지 않도록 합니다.
3.제로 편향 계산: 획득 된 회전경 출력 데이터는 이상값을 제거하기 위해 사전 처리됩니다 (3σ 기준을 사용하여), 그 다음 각 축의 출력 신호의 평균 값을 계산합니다.이 평균 값은 지로스코프의 정적 제로 편차 b (i=X)동시에 데이터의 표준편차는 회전경의 소음 수준을 평가하기 위해 계산됩니다.표준편차가 너무 크면 (IMU 기술 사양을 초과), 장비 고장 또는 환경 간섭은 조사해야합니다.
4.요금점 계획: IMU의 범위와 실제 응용 시나리오에 따라, pitch 및 롤 두 가지 차원 모두에서 동적 속도 포인트를 계획. 각 차원에 대해 5-7 속도 포인트를 선택,전속 및 역환 금리 (e-100°/s, -50°/s, 0°/s, 50°/s, 100°/s) 에서 0°/s 속도 포인트를 사용하여 정적 제로 편향의 일관성을 확인합니다.요금 지점 선택은 IMU의 범위를 초과하지 않고비율테이블은 안정적으로 속도를 출력 할 수 있습니다 (속도 안정성 ≤ 0.1°/s).
5.생산률 및 안정화: 각 속도 포인트에 대한 명령은 두 개의 축을 통해 pitch 및 롤 차원에서 순차적으로 전송됩니다.비율테이블 제어 소프트웨어.비율테이블은 IMU를 목표 속도로 회전하도록 유도합니다. 안정화 시간 ≥ 20s로 동적 안정성을 유지합니다. 안정화 중에 각 속도 피드백 신호는비율속도 오차가 허용 범위 (≤0.5°/s) 를 초과하면비율테이블은 자동으로 비율 보상 수행합니다.
6.데이터 수집 및 기록: 각 속도 포인트가 안정화 된 후, 회전경의 대응 민감 축의 출력 신호를 획득하기 위해 데이터 획득 소프트웨어를 시작 (예를 들어,피치 차원에서 회전 할 때 X 축 자이로스코프 출력을 획득합니다., 그리고 롤 차원에서 회전 할 때 Y 축 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회전 회비율표 (반응 입력 ω) 를 입력하고, 속도 포인트와 차원에 따라 데이터를 저장합니다.
7.오류 모델 설정 및 매개 변수 해결: 자이로스코프의 속도 오류 모델은 교차 결합 오류를 무시합니다. 모델은 다음과 같습니다.
ω = K(ω + b) (i=X,Y)
여기 ω는 회전경의 i 축의 출력 각도율, K는 i 축의 규모 인자, ω는 i 축의 참조 각도율 (전자 회전경의 실제 출력 속도)비율테이블), 그리고 b는 i 축의 정적 제로 편차입니다. ω과 각 속도 포인트에 해당하는 ω을 모델로 대체합니다.그리고 최소 제곱 방법을 사용하여 K를 해결합니다.
Ⅲ.데이터 처리 및 검증
데이터 처리 및 검증은 캘리브레이션 결과의 신뢰성을 보장하는 핵심 단계입니다. 수집 된 원료 데이터는 사전 처리되어야하며 오류 매개 변수를 해결한 후 잔류 분석은,반복성 검증 및 정확성 검증이 수행되어야 합니다. 검증이 실패하면, 프로세스는 재분校을 위해 핵심 캘리브레이션 절차로 돌아가야 합니다.
1.외형 제거: 3σ 기준 또는 Grubbs 기준은 원본 데이터 (가속, 각 속도 신호) 에서 이상값을 감지하고 제거하는 데 사용됩니다.데이터의 평균 μ와 표준편차 σ가 계산됩니다.범위 [μ-3σ, μ+3σ]를 초과하는 데이터는 외형값으로 식별되고 인접한 데이터의 중점화로 대체되거나 직접 제거됩니다.
2.필터링: 미리 처리 된 원료 데이터는 고주파 소음을 제거하기 위해 낮은 통과 필터를 사용합니다. 버터워스 낮은 통과 필터가 선택됩니다.그리고 절단 주파수는 과도한 필터링과 신호 왜곡을 피하기 위해 IMU 대역폭 (일반적으로 IMU 대역폭의 1/5에서 1/3) 에 따라 결정됩니다.필터링 된 데이터는 후속 오류 매개 변수 계산에 사용됩니다.
3.데이터 동기화 정렬: IMU 출력 신호와 IMU 출력 신호 사이의 시간표 차이점을 해결하기 위해비율테이블 피드백 신호, 선형 인터폴레이션은 동기화 정렬에 사용됩니다. 이것은 IMU 출력 데이터의 각 세트가 정확한비율테이블 자세 또는 속도 상태, 동기화 오류 ≤1ms
4.매개 변수s발음o최적화:사전 처리된 데이터를 가속도계와 회전경의 오류 모델로 대체하고, 최소 제곱 방법을 사용하여 제로 편향 및 스케일 인수와 같은 오류 매개 변수를 해결합니다.복잡한 시나리오에서, 칼만 필터 방법은 매개 변수 솔루션 결과를 최적화하여 매개 변수 추정의 정확성과 안정성을 향상시키는 데 사용할 수 있습니다.
5.잔류분석: 관찰 값 (IMU 출력) 과 모델 예측 사이의 잔액을 각 캘리브레이트 된 자세/비율 포인트에서 계산합니다. 잔액은 오류 모델의 적절한 정확도를 반영합니다.만약 잔액의 평균이 0에 가깝고 표준편차가 작다면 (속속 잔류 표준편차 ≤ 0).002g, 각도 속도 잔류 표준편차 ≤ 0.1°/s), 그것은 모델이 잘 맞다는 것을 나타냅니다. 잔류가 너무 커거나 명확한 경향을 나타내면 오류 모델 (예를 들어,크로스 커플링 오류를 고려하거나 캘리브레이션 데이터의 유효성을 재검토해야 합니다..
6.반복성 검증: 동일한 환경 조건과 캘리브레이션 절차에서 세 번의 완전한 캘리브레이션 실험을 수행하고 각 캘리브레이션의 오류 매개 변수를 결정한다.세 가지 매개 변수의 변동 계수를 계산합니다 (평균에 표준편차의 비율)변동률이 ≤1%인 경우, 캘리브레이션 결과는 좋은 반복성을 가지고 있습니다. 변동률이 너무 크면,장비의 안정성 및 환경 간섭과 같은 문제가 조사되어야합니다., 그리고 재정렬을 수행해야 합니다.
7.정확성 검증: 정렬에 참여하지 않는 자세/속도 지점을 확인 지점으로 선택합니다. IMU 출력을 보상하기 위해 정렬된 오류 매개 변수를 오류 모델에 교체합니다.그리고 보상된 IMU 출력과 기준 입력 사이의 오류를 계산합니다.보상된 오류가 IMU 기술 사양에 부합하는 경우 (예를 들어 가속 측정 오류 ≤ 0.01g, 각도 측정 오류 ≤ 0.5°/s), 캘리브레이션 정확도는 만족스럽습니다.오류가 요구 사항을 충족하지 않으면, 캘리브레이션 프로세스는 다시 최적화되어야합니다 (예를 들어, 캘리브레이션에 대한 더 많은 자세 / 속도 포인트를 추가하고 오류 모델을 조정하십시오) 그리고 캘리브레이션은 다시 수행해야합니다.
8.온도 안정성 검증 (선택): IMU가 넓은 온도 범위에서 작동해야 할 경우, 캘리브레이션 실험은 다른 온도 포인트 (예를 들어, -10°C, 0°C, 20°C, 40°C,60°C) 로 온도와 오류 매개 변의 확인다른 온도 조건에서 IMU의 측정 정확성을 향상시키기 위해 오류 매개 변수에 대한 온도 보상 모델을 설정 할 수 있습니다.
9.분류 데이터 저장: 사전 처리 된 원료 데이터, 오류 매개 변수 솔루션 결과, 잔류 분석 보고서, 확인 결과 등은 캘리브레이션 날짜, IMU 번호에 따라 분류 및 저장됩니다.및 캘리브레이션 환경 조건데이터 저장 형식은 데이터 가독성과 추적성을 보장하기 위해 일반적인 형식 (CSV, MAT, PDF) 을 채택합니다.
10.데이터 백업: 데이터 손실을 방지하기 위해 보관 된 데이터의 여러 백업 (국가 하드 드라이브 및 클라우드 스토리지와 같은) 을 수행합니다. 백업 데이터는 파일 이름과 설명 문서를 명확하게 표시해야합니다.해당 목표의 명확한 정의, 프로세스, 조건
Ⅳ.가공 작업
마지막 단계는 주로 캘리브레이션 데이터의 기록, 장비의 복원 및 유지보수,그리고 캘리브레이션 프로세스의 추적성을 보장하고 IMU의 후속 사용 및 유지보수를 위한 기초를 제공하기 위해 캘리브레이션 보고서를 작성합니다.캘리브레이션 보고서는 캘리브레이션 작업의 요약이며, 캘리브레이션 과정과 결과를 포괄적이고 정확하게 기록해야 하며, 주로 다음을 포함해야 합니다.
1.장비의 종료 및 해체: 캘리브레이션 후, 양 축에 전원을 끄비율테이블, IMU 및 데이터 수집 장비. IMU를 연속적으로 장착 장치에서 분리하고 IMU를 제거합니다.IMU의 민감한 구성 요소를 보호하기 위해 분해하는 동안 충돌 및 진동을 피하십시오..
2.장비c기울기 및m주의: 이중 축 r를 청소먹었다테이블, 샤프트 시스템 및 먼지와 잔해를 제거하는 장착장치; IMU의 시각 검사를 수행하여 손상되지 않았는지 확인하고 배선 포트가 깨끗하다는 것을 확인합니다.주기적인 장비 캘리브레이션의 기초를 제공하기 위해 장비의 사용 상태와 유지보수 세부 사항을 기록합니다..
3.장비 파라미터 복원: 이중축의 매개 변수를 복원비율테이블 및 데이터 수집 장비의 기본 상태로, 제어 소프트웨어 및 수집 소프트웨어를 닫고 장비가 안전한 대기 상태로 있는지 확인합니다.
4.캘리브레이션 보고서다음을 포함합니다.:
(1)캘리브레이션 대상 정보: IMU 모델, 일련 번호, 제조업체 및 기술 사양
(2)캘리브레이션 장비 정보: 듀얼 액스 r먹었다표 모델 및 정확도 클래스, 데이터 수집 장비 모델 및 샘플링 매개 변수 및 보조 장비 목록
(3)환경 조건: 온도, 습도, 공기 압력, 진동
(4)캘리브레이션 프로세스 설명: 캘리브레이션 자세/속도 포인트 계획, 데이터 획득 매개 변수, 오류 모델 및 솔루션 알고리즘
(5)캘리브레이션 결과: 가속도 측정기 제로 편향 및 스케일 요인, 지로스코프 제로 편향 및 스케일 요인, 잔류 분석 결과, 반복성 검증 결과 및 정확성 검증 결과
(6)결론과 권고: 캘리브레이션 결과가 표준에 부합하는지, IMU 사용에 대한 권고 (온도 보상, 주기적인 재칼리브레이션 사이클 등)그리고 장비 유지보수에 대한 권고.
Ⅴ.주의 사항
요약하자면, IMU의 2차원 캘리브레이션을 위한 표준 절차는먹었다테이블은 엄격히 "예정 정렬 준비 - 핵심 정렬 - 데이터 처리 및 검증 - 마무리"의 논리적 순서를 따라야합니다.일," 장비 정확성, 환경 제어, 축 정렬 및 데이터 동기화와 같은 주요 측면에 초점을 맞추고 표준화 된 캘리브레이션 절차와 엄격한 검증 방법을 통해IMU의 오류 매개 변수를 정확하게 결정할 수 있습니다., 측정 정확도를 크게 향상시키고 관성 항법 시스템의 신뢰할 수있는 작동을 보장합니다.
1.만약비율캘리브레이션 도중 테이블 자세 변동 또는 이상적인 IMU 출력 신호가 발생하면 캘리브레이션을 즉시 중단하고 결함이 조사되어야 합니다.유효하지 않은 캘리브레이션 데이터를 생성하지 않도록 캘리브레이션을 다시 시작해야 합니다..
2.The전열IMU의 시간은 기술 요구 사항을 엄격히 준수해야합니다.전열불안정한 오류 매개 변수를 초래하고 캘리브레이션 정확성에 영향을 줄 것입니다.
3.이중축 r의 축 시스템의 정렬 정확성먹었다이 표는 캘리브레이션 결과에 직접적으로 영향을 미칩니다.먹었다축 시스템 정확도가 요구 사항을 충족하는지 확인하기 위해 테이블이 정기적으로 캘리브레이를해야합니다.
4.온도, 진동, 전자기 간섭 및 캘리브레이션 환경의 다른 요인은 IMU 출력에 상당한 영향을 미칩니다.환경 조건은 엄격히 통제되어야 하며, 필요한 경우 격리 및 보호 조치를 취해야 합니다..
5.캘리브레이션 보고서는 전문가에 의해 검토되어야 하며, 보고서의 내용의 정확성과 표준화를 보장해야 하며, 검토가 승인된 후 보관되어야 합니다.